|
|
| (169 intermediate revisions by the same user not shown) |
| Line 1: |
Line 1: |
| __TOC__
| | == Dead Reckoning == |
| ===Introduction===
| | '''Dead Reckoning''' is a navigation technique used to estimate current position of vehicle , direction of movement, based on its previous position and known speed. It uses additional sensor data to correct the position received from GNSS receiver.<br> |
| We are always improving our devices performance, stability and reliability. That’s why Teltonika is one of the leading GNSS trackers manufacturers in the world.<br />
| |
| This document describes '''FMBXXX, FMCXXX, FMUXXX, FMMXXX platform''' devices firmware improvements, changes, new features implementations as well as current firmware release version.
| |
|
| |
|
| {| class="wikitable" style="width: 60%;"
| | Usage of Dead Reckoning is essential in scenarios where GNSS signal is weak or unavailable, such as underground parking lots, tunnels or dense forests.<br> |
| |+
| |
| ! style="width: 20%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: center;" |FIRMWARE VERSION
| |
| ! style="width: 40%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: left;" |SUPPORTED HARDWARE
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |01.00.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |01.01.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |01.03.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.01.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.02.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.06.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX, FM30XY
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.07.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX, FM30XY, FMB2YX
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.18.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX, FM30XY, FMB2YX, FMT100
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.25.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX, FM30XY, FMB2YX, FM30XY, FMT100
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.27.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB0YX, FMB9X0, FMB96X, FMB1YX, FMU1YX, FMM1YX, FMC1YX, FMM001, FMC001, FM30XY, FMB2YX, FMT100
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.29.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB010, FMB020, FMT100, FMB900, FMB910, FMB920, FMC920, FMM920, FMB110, FMB120, FMB122, FMB125, FMB130, FMC125, FMC130, FMC13A, FMM125, FMM130, FMM13A, FMB202, FMB204, FMB209, FMB225, FMB230, FMC225, FMC230, FMM230, FMB001, FMB003, FMC001, FMC003, FMC00A, FMM001, FMM003, FMM00A, FMB140, FMB240
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |04.00.XX
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB010, FMB020, FMT100, FMC800, FMM800, FMM80A, FMC880, FMM880, FMB900, FMB910, FMB920, FMC920, FMM920, FMB110, FMB120, FMB122, FMB125, FMB130, FMC125, FMC130, FMC13A, FMM125, FMM130, FMM13A, FMB202, FMB204, FMB225, FMB230, FMC225, FMC230, FMM230, FMC234, FMB001, FMB003, FMC001, FMC003, FMC00A, FMM001, FMM003, FMM00A, FMB140, FMB240
| |
| |}
| |
|
| |
|
| ===Evaluation firmware branches===
| | Key points to understand before utilizing the Dead Reckoning functionality: |
| | * Installation |
| | * Configuration |
| | * Alignment |
|
| |
|
| Newly introduced Teltonika Telematics products start their lifecycle and mass production running evaluation branch firmware versions, which may be based on older BASE firmware version or separate firmware branch, therefore may have different features. Such products do not immediately receive identical improvements as products in BASE firmware until their support is added. Currently such products are:
| | === <u>Prerequisites and Important Settings</u> === |
| | * Device mounting quality – Correct device mounting is critical for Dead Reckoning operation. Improper mounting may result in incorrect sensor data and unreliable Dead Reckoning performance. |
| | * Dead Reckoning alignment maintenance – If Dead Reckoning alignment parameters are no longer valid, send the DR_RESET command and perform calibration. |
| | * Electric and hybrid vehicles – For electric and hybrid vehicles, DIN1 should be used for movement detection to ensure correct Dead Reckoning operation. |
| | * Dead Reckoning is not supported for two‑wheeled vehicles (e.g., motorcycles, scooters). |
|
| |
|
| {| class="wikitable" style="width: 60%;"
| | === <u>Basic Operation</u> === |
| |+
| |
| ! style="width: 20%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: center;" |FIRMWARE VERSION
| |
| ! style="width: 40%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: left;" |HARDWARE
| |
|
| |
|
| |-
| | '''<u>Installation</u>'''<br> |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.29.00.Rev.157
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB150, FMC150, FMM150, FMC250, FMM250
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.29.00.Rev.932
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB965, FMB930
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.29.00.Rev.554
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMP100, FMB020
| |
| |-
| |
| ! style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |03.29.00.Rev.263
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |FMB209
| |
| |-
| |
| |}
| |
|
| |
|
| ===Firmware versioning===
| | The device must be mounted firmly in the vehicle, with good visibility of the sky. Failure to ensure proper mounting will result in inability to calibrate the device or inaccurate position estimation. Following examples ensure that the GNSS antenna is facing towards the sky and there are no physical obstacles, like metal plates, wires, are blocking the GNSS signal. |
|
| |
|
| *Structure
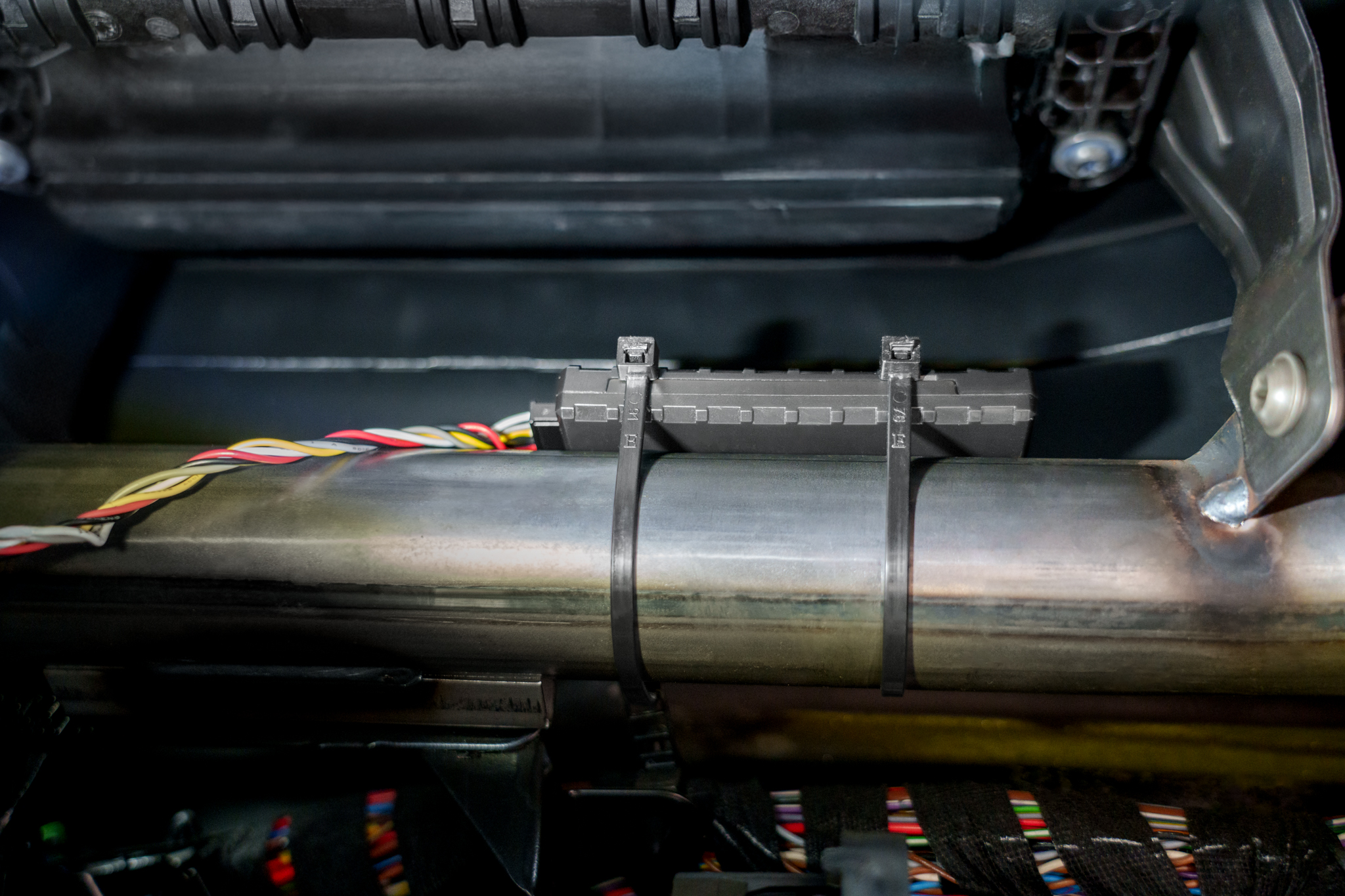
| | Good '''mounting''' examples ( <span style="color:red">'''If vehicle has a heated windshield, you should look for an alternative mounting location in the trunk, on some sturdy metal closer to backseat window'''</span>):<br> |
| | <div style="display: flex; flex-direction: row;"> |
| | [[File:FTC927 under the front dashboard in the middle of the car.jpg|thumb|left|280px|link=Special:Redirect/file/FTC927 under the front dashboard in the middle of the car.jpg|Dashboard in the middle of the car mount]] |
| | [[File:FTC927 beneath the speedometer panel.jpg|thumb|left|300px|link=Special:Redirect/file/FTC927 beneath the speedometer panel.jpg|Beneath the speedometer panel]] |
| | [[File:FTC927 above the glove box.jpg|thumb|left|300px|link=Special:Redirect/file/FTC927 above the glove box.jpg|Above glove box]] |
| | </div> |
|
| |
|
| FMB(T).VER.[<code>XX</code>].[<code>YY</code>].[<code>ZZ</code>].Rev.[<code>##</code>] _[<code>ID###</code>] | | Bad '''mounting''' examples:<br> |
| | <div style="display: flex; flex-direction: row;"> |
| | [[File:Dead Reckoning Unwanted movements will be detected by the IMU.png|thumb|left|280px|link=Special:Redirect/file/Dead Reckoning Unwanted movements will be detected by the IMU.png|Unwanted movements will be detected by the IMU]] |
| | [[File:Dead Reckoning Metal parts above the mount.png|thumb|left|300px|link=Special:Redirect/file/Dead Reckoning Metal parts above the mount.png|Metal parts above the mount]] |
| | [[File:Dead Reckoning vibration could cause unwanted device movements.png|thumb|left|300px|link=Special:Redirect/file/Dead Reckoning vibration could cause unwanted device movements.png|Places, where vibration could cause unwanted device movements]] |
| | </div> |
|
| |
|
| *Syntax description
| | '''<u>Configuration</u>'''<br> |
| **<code>XX</code> – major FW version.
| |
| **<code>YY</code> – branch number, shows major changes in firmware, i.e. new module support added or new major feature added.
| |
| **<code>ZZ</code> – major changes like bigger fixes, improvements and new features addition.
| |
| **<code>##</code> – minor changes like small fixes and improvements.
| |
| **<code>ID[###]</code> – Spec ID KEY – Specific clients FW changes.
| |
|
| |
|
| ===Firmware versions===
| | [[File:Dead Recknonig TCT panel_2.png|right|500px]] |
|
| |
|
| {| class="wikitable" style="width: 100%;"
| | ''The Dead Reckoning feature is configurable via the Dead Reckoning section in the GNSS settings group under System view in TCT.'' |
| |+
| |
| ! style="width: 20%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: center;" |FIRMWARE VERSION
| |
| ! style="width: 20%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: center;" |RELEASE DATE
| |
| ! style="width: 60%; border: 1px solid white; border-bottom: 2px solid #0054A6; background: white; color: #0054A6; text-align: left;" |CHANGES
| |
| |-
| |
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="04.00.00.Rev.14">{{{fw|'''04.00.00.Rev.14'''}}}</span><br /> (recommended for FMC920, FMC880, FMC800)
| |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2025.07.01}}}
| | Parameter list can be found [[{{{model}}}_System#Parameter_list|here]]. |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: top; background: white;" |
| |
| * Corrected an issue in the factory test procedure where the modem on Quectel EG915U-based devices failed to recover the correct baud rate, causing delayed startup
| |
| |-
| |
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: top; background: white;" |<span class="mw-headline" id="04.00.00.Rev.13">{{{fw|'''04.00.00.Rev.13'''}}}</span><br /> (recommended for FMB900, FMB910, FMB920, FMC920, FMM920, FMT100, FMC880 (Quectel EG915U-EU), FMM880, FMC800, FMM800, FMB110, FMB120, FMB130, FMB202, FMB204, FMB230, FMC130 (MeiG SLM320-PE2C, SLM320-PE2H, SLM320-L16A, SLM320-L16B), FMC230, FMC234, FMM130 (Quectel BG95-M3), FMM230, FMB125, FMC125 (MeiG SLM320-PE2C, SLM320-PE2H, SLM320-L16A, SLM320-L16B), FMC225, FMB140)
| |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: top; background: white;" |{{{release_date| 2025.05.26}}}
| | ===== Dead Reckoning alignment status ===== |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: top; background: white;" |
| |
| * '''NEW!''' <span style="color: yellow;">[[Major_version_update_to_4.0.0|Major version updated to 4.0.0 and downgrade protection added]]</span>
| |
| * '''NEW!''' Added support for [[FMC880|FMC880]], [[FMM880|FMM880]]
| |
| * '''NEW!''' Added support for [[FMC800|FMC800]], [[FMM880|FMM800]], [[FMM80A|FMM80A]]
| |
| * '''NEW!''' Added support for [[FMC234|FMC234]]
| |
| * '''NEW!''' Modem recovery mechanism to address modem hangs resulting from network issues or poor signal conditions
| |
| * '''NEW!''' Implemented support for encrypted CAN commands over Bluetooth
| |
| * '''NEW!''' Enhanced “Advanced Unplug Detection” with additional condition options for speed and delay
| |
| * '''NEW!''' Added Beacon option for “Authorized Read Notification” feature
| |
| * '''NEW!''' Added Dynamic Ground vector feature for more accurate accelerometer data
| |
| * '''NEW!''' Added “Window state” security state flag elements
| |
| * '''NEW!''' Enabled devices to send records to a duplicate server via TCP in Codec JSON, while the primary server uses MQTT with TLS encryption
| |
| * '''NEW!''' Enabled “Driving state” and “Driving records” I/O elements for FMC880/FMM880 devices
| |
| * '''NEW!''' Added a DIN3 option as a trigger for outgoing calls in HF settings
| |
| * '''NEW!''' Added "set calibration" command
| |
| * '''NEW!''' Added a new GNSS I/O status value '4' - GNSS ON with an active GNSS filter.
| |
| * '''NEW!''' “Stay Awake” parameter option added for “Sleep Mode”
| |
| * '''NEW!''' “DTC Request on Engine Start” feature to avoid conflicts with external diagnostic equipment
| |
| * '''NEW!''' Added support of PCB temperature I/O element for devices with NTC
| |
| * '''NEW!''' Added support for TCP BIN/ASCII data forwarding in JSON CODEC format
| |
| * '''CHANGED!''' Default logging filters updated
| |
| * '''CHANGED!''' Unplug detection events are allowed to be sent before device going to Low Power Mode
| |
| * '''CHANGED!''' Adjusted accelerometer sensitivity to be more suitable for crash detection
| |
| * '''CHANGED!''' Set GNSS jamming DOUT control to a higher priority over maintenance DOUT
| |
| * '''CHANGED!''' Modifications to calibration algorithm for greater accuracy
| |
| * '''CHANGED!''' BLE Advertising period changed to 500 ms
| |
| * '''CHANGED!''' Refactored the Immobilizer Authorized ID checking feature
| |
| * '''CHANGED!''' Conditions when device operation is prohibited updated
| |
| * '''CHANGED!''' Adjusted the operator ban list logic to have a search timeout of 5 minutes and a ban time of 30 minutes
| |
| * '''CHANGED!''' Incremental retry periods for AGPS EPO download to improve successful download time period
| |
| * '''CHANGED!''' Program number parameter ID 11120 size increased and max value to 99999
| |
| * '''CHANGED!''' Additional traces for GPS and GSM jamming status in device log
| |
| * '''CHANGED!''' Enabled band 26 selection for devices equipped with Quectel BG95-M3 modems
| |
| * Adjusted battery percentage table for FMC234
| |
| * Corrected the limit connections management in Low Power Mode
| |
| * Resolved issue where MCC calculation was done incorrectly forcing device to enter blocked state
| |
| * DualSIM switching process speed adjusted for devices with MeiG modems
| |
| * Improved socket status reading for BG9X modems to correcly handle data sending if socket is closed
| |
| * Corrected the byte inversion issue in 1-Wire Matrix (ReadROM) ID parsing
| |
| * Device abnormal working with dynamic bt name when using value of 16 characters with %imei function resolved
| |
| * Addressed issues where the device behaved abnormally after receiving a #FWD DAT command with the target set to Bluetooth and a NULL payload
| |
| * Fine-tuned the parsing for start and end delimiters in RS232 Delimiter mode to enhance functionality
| |
| * Fixed an issue where high priority records were not sent if a call was triggered by a feature activation
| |
| * Resolved an issue where link was not close properly sometimes after sending a record in Low Power Mode
| |
| * Enhanced the retry mechanism for SIM PIN entries if the initial attempt was unsuccessful
| |
| * Adjusted the saving of the Digital Output state post-firmware update when the inverted mode is selected
| |
| * Enabled missing CAN RSF parameters
| |
| * Resolved unexpected wake-ups from sleep due to repeated time-sync issues and server failures to close sockets correctly
| |
| * Patched the fail count algorithm for 1-wire data reading to improve stability
| |
| * Disallowed GSM updates during server response wait periods to prevent duplicate record sending in online deep sleep mode
| |
| * Removed disallowed MCCs (250, 257, 432, 368, 467) from the APN list
| |
| * Improved parsing of VIN and Trailer VIN values
| |
| * Resolved EYE Sensor filtering issue by MAC or Name when configuration parameter “Identifier” was changed
| |
| * Resolved an issue where UL202 record value was incorrectly parsed in device logs
| |
| * Changed the BLE advanced data offset type to signed to correct inaccuracies when negative offsets were used
| |
| * Updated the DOUT control from the Ignition FSM to prevent feature bypass when switching ignition on and off within 1 second
| |
| * Adjusted the conversion of EYE "Major" and "Minor" values, ensuring data is packed according to Bigger Endian format when "Lost&Found" record are generated
| |
| * Corrected a typographical error in the lvcangetinfo response
| |
| * Resolved an issue where the device was unable to enter sleep mode due to an NTP sync being stuck
| |
| * Fixed an issue where the first GPRS command was ignored after the device connected to a Backup Server
| |
| * Resolved an issue where DTC fault codes were not correctly packed into records for some EV and Hybrid vehicles
| |
| * Improved SIM switch logic in devices equipped with Quectel modems
| |
| * Removed an unnecessary filter for the instant movement element status
| |
| * Resolved an issue where private/business mode was not functioning according to the weekly schedule
| |
| * Improved device stability when NMEA logging is enabled via RS232 at 9600 baud
| |
| * Enhanced device stability when a 2kHz signal is detected by the device using "Advanced Pulse Counter" feature
| |
| * Resolved an issue where 2G devices could not open a socket for a period after disconnecting from the network due to poor network conditions
| |
| * Resolved an issue where duplicate records were created if UART communication with the modem stopped working while the device was in GNSS/ODS sleep mode and USB was connected
| |
| * Improved the handling of the socket closing for devices with MeiG modules when TLS and Deep Sleep are used
| |
| * Improved the stability of OBD dongle data reading after a Bluetooth module restart
| |
| * Resolved an issue where the device would sometimes fully wake up from Deep Sleep due to periodic record sending
| |
| * Resolved an issue where the "Advanced Pulse Counter" parameter ID 145 would not reset to default settings via configurator
| |
| * Resolved an issue where EYE Beacon flag 27 data voltage and temperature values was not included not into record when "Beacon Simple" mode was used
| |
| * Improved the accuracy of device tracking location in "Low Power Mode"
| |
| * Resolved an issue where the getinfo response was split into several SMS messages
| |
| * Improved device stability when Private Mode is triggered by Virtual DIN2
| |
| * Resolved an issue where firmware downloads would interrupt frequent record sending for devices with MeiG modules
| |
| * EYE sensors status are now shown correctly in device logs
| |
| * Resolved an issue where on random cases, a trip end event was received with the trip odometer already reset to 0
| |
| * Adjusted so that the movement off timeout would not reset after device restart
| |
| * Disabled unnecessary tasks to decrease current consumption in UDS mode
| |
| * Resolved an issue where the WD counter was not functioning as expected in ODS mode
| |
| * Reduced the delay for Immobilizer activation after waking up from sleep
| |
| * Resolved an issue where the GNSS module would not return to operation after being jammed
| |
| * Resolved an issue where the program number could not be changed sometimes with an SMS command
| |
| * Applied a patch to support APDU commands, preventing connectivity issues when the device uses specific SIMs and crosses borders
| |
| * Ensured odometer values are saved after a fix loss to prevent resetting when the device powers off
| |
| * Applied a patch so that timestamps in crash traces are calculated relative to the crash event, preventing trace damage if a time jump occurs during a crash
| |
| * Applied a patch to improve Bluetooth interface stability when detecting a large number of Beacons
| |
| * Resolved an issue where the "On-Demand Tracking", "Activation By" parameter ID 10992 would not reset to default via configurator
| |
| * Resolved an issue where EYE sensor I/O values would be included in the record even if the "Working Mode" parameter was configured as "Disabled"
| |
| * Movement will be accurately detected after the movement detection delay period, and not simultaneously with towing detection when it is activated
| |
| * Resolved an issue where the Immobilizer would not retrigger the Digital output immediately if the ignition was turned on for shorter than 1 second
| |
| * Adjusted the btgetlist 3 command to return a full scanned object list
| |
| * Resolved an issue where the "Odometer Calculation Source" parameter ID 11806 did not reset back to the default value when the configuration was reset
| |
| * Resolved an issue where Beacon info remained visible in the configurator UI even when detection was disabled
| |
| * Resolved an issue where the TTFF (Time to First Fix) result was sometimes reported as 0 even though a fix was acquired
| |
| * Resolved an issue where the Digital Output was not activated by the "Immobilizer" scenario when the "Ignition Off timeout" was set to longer than the "Sleep Timeout"
| |
| * Implemented a minor interface control tweak for 1-wire interface stability
| |
| * Removed unnecessary spam from device log prints
| |
| * Corrected the behavior to stop advertising BLE packets once a connection is established
| |
| * Resolved an issue where the device's 1-Wire interface functioned incorrectly if the 1-Wire in Sleep mode parameter value changed while the device was in sleep mode
| |
| * Resolved an issue where fake movement was detected due to incorrect GNSS speed data acquired from the GNSS module
| |
| * Tweaked the BLE GATTS disconnect process to enable correct disconnection
| |
| * Resolved an issue where devices in Deep Sleep mode would sometimes fail to report the disconnected status using MQTT
| |
| * Resolved an issue where devices with MeiG modules would repeat a call after the first one was rejected
| |
| * Resolved an issue where the Authorization ID List check by Beacon could not be configured for FMX1XY devices
| |
| * Inverted DOUT state no longer resets after a soft reset
| |
| * Resolved an issue where movement delay was not resetting correctly if the movement state changed
| |
| * Device external module startup time improved when waking from ODS
| |
| * Resolved an issue where logging to dump would stop after a soft reset.
| |
| * Resolved an issue where the FMX880 device would lose fix for a short amount of time
| |
| * Adjusted Watchdog behavior when the device is still connected to a network operator
| |
| * Beacon record generation now properly waits for the Bluetooth stabilization period
| |
| * Resolved an issue where devices with a Quectel module would save an incorrect timestamp when waking from GNSS sleep mode
| |
| * Resolved an issue where entering the Features paragraph in the configurator sets a new value for parameter 11703
| |
| * SIM detection and reading time improved for devices with Quectel BG95-M3 modules
| |
| * Improved battery percentage reading for FMB204 devices
| |
| * Adjusted communication with AG3335 to fix issues where FMX880 devices would sometimes take a longer period to acquire a GNSS fix
| |
| * Resolved an issue where the modem was not starting as expected when the device initiated record sending in Low Power mode
| |
| |-
| |
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.29.00.Rev.21">{{{fw|'''03.29.00.Rev.21'''}}}</span><br /> (recommended for FMB122, FMB125, FMM125, FMC125 (SLM320-LA, SLM320-E2, EC21-EC), FMC225, FMC920)
| |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2024.08.07}}}
| | The Dead Reckoning alignment status is a 1-byte AVL ID (1433) that indicates the current status of the Dead Reckoning alignment. The possible values are:<br> |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: top; background: white;" |
| | * '''0''' - Unknown: Dead Reckoning status is unknown. |
| * Optimized the startup process of the network modules to improve pass-rate during manufacturing testing. | | * '''1''' - Init: Dead Reckoning alignment is initializing. |
| * Dual SIM switching enhancements to improve pass-rate during manufacturing testing. | | * '''2''' - Coarse: Dead Reckoning is in alignment stage. |
| * Return real SIM slot for factory testing commands.
| | * '''3''' - Stable: Dead Reckoning alignment stage has been completed. Estimation stage is in progress. |
| |-
| | * '''99''' - Standby: Dead Reckoning is in standby mode ('''NOTE''': this status is availabe with 3.7.X or newer firmware version) |
|
| |
|
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.29.00.Rev.18">{{{fw|'''03.29.00.Rev.18'''}}}</span><br /> (recommended for FMB209)
| | ===== Turning alignment ===== |
| | The turning alignment is a 1-byte AVL ID ('''1434''') that indicates the current percentage of the turning alignment of the device. |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2024.05.17}}}
| | ===== Straight alignment ===== |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: top; background: white;" |
| | The straight alignment is a 1-byte AVL ID ('''1435''') that indicates the current percentage of the straight alignment of the device. |
| * Added FMB209 support
| | ''' |
| |-
| |
|
| |
|
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.29.00.Rev.18">{{{fw|'''03.29.00.Rev.18'''}}}</span><br /> (recommended for FMT100, FMB900, FMB910, FMB920, FMC920, FMM920, FMB110, FMB120, FMB122, FMB130, FMC130 (SLM320-LA, SLM320-E2, EC21-EC, EC21-AU), FMC13A, FMM130 (BG95-M3, BG96), FMM13A, FMB202, FMB204, FMB206, FMB230, FMC230, FMM230, FMB140, FMB240, FMB125, FMC125 (SLM320-LA, SLM320-E2, EC21-EC), FMM125 (BG95-M3), FMB225, FMC225)
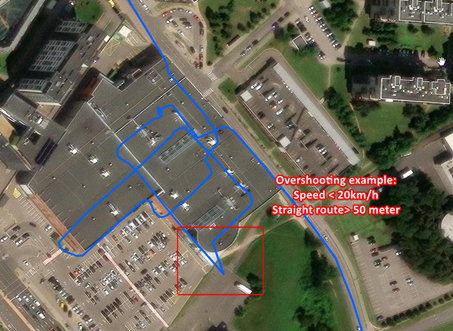
| | '''<u>Alignment</u>'''<br> |
| | Once device mounting adheres to the guidelines, alignment can be performed. The device '''must finish''' a specific alignment process to '''determine''' its mounting orientation. During this process, there are specific conditions that must be met: |
| | # The device must be '''stationary''' with clear sky visibility for at least 3 minutes. |
| | <!--# A great number of '''left and right''' turns must be performed.--> |
| | # Vehicle speed during alignment should be between 10 km/h and 100 km/h, with varying speeds preferred over extended constant-speed driving. |
| | # Avoid driving in underground tunnels or areas with poor GNSS signal, otherwise alignment needs to be restarted from the second step. |
| | [[File:Dead Reckoning TCT Swift .png|right|400px]] |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2024.05.13}}}
| | === <u>Standby mode</u> === |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: top; background: white;" |
| |
| * Improved reconnection to new operator time if GPRS was unavailable with initial operator
| |
| * Fixed pro-longed reconnection to new operator due to record tasks interrupting operator search
| |
| * Fixed network session closing when current operator is added to blacklist
| |
| * Improved module initialization time for devices with Quectel modems
| |
| * Fixed Digital Output state restore after firmware update
| |
| * RS232 interface stability improvements
| |
| * GNSS status element state improvements
| |
| * Time synchronization improvements
| |
| * Manufacture testing improvements
| |
| |-
| |
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.29.00.Rev.263">{{{fw|'''03.29.00.Rev.263'''}}}</span><br /> ((only for FMB209)
| |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2024.04.02}}}
| | Standby Mode preserves Dead Reckoning calibration indefinitely, ensuring accurate position estimation after extended GNSS outages (e.g., a week in underground parking), and supports unlimited duration in this mode while maintaining full calibration integrity. |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: top; background: white;" |
| |
| * Added support for use with FMB209 EU version
| |
|
| |
|
| |-
| | Standby Mode has two behavior options: |
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.29.00.Rev.14">{{{fw|'''03.29.00.Rev.14'''}}}</span><br /> (recommended for FMM130 with BG95-M3, FMM230, FMC125 with MeiG SLM320, FMC225, FMC13A)
| | * '''Realignment''' – Calibration alignment is discarded after the Standby Timeout period. |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2023.12.13}}}
| | * '''Preserve alignment''' – Calibration alignment is retained during prolonged stationary periods. |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| * '''NEW!''' '''[[EYE_SENSOR_/_BTSMP1#Teltonika_configurator_new_functionalities_.28Evaluation_firmware_.2F_EYE_Sensor_filtering_by_name.29|TELTONIKA EYE Beacon and EYE Sensor easy configuration]]''' functionalities added
| |
| * '''NEW!''' '''[[EYE_SENSOR_/_BTSMP1#Teltonika_configurator_new_functionalities_.28Evaluation_firmware_.2F_EYE_Sensor_filtering_by_name.29|TELTONIKA EYE Beacon Lost & Found and Proximity Event]]''' functionalities added
| |
| * '''NEW!''' '''[[Secure_vehicle_disabling|SECO]]''' functionality added
| |
| * '''NEW!''' '''[[{{{name|}}}_Bluetooth®_4.0_settings#Backup_Tracker|Back-Up Tracker]]''' functionality added
| |
| * '''NEW!''' '''[[{{{name|}}}_Features_settings#GNSS_Jamming|GNSS jamming]]''' functionality added
| |
| * '''NEW!''' '''[[{{{name|}}}_System_settings#Low_Power_Mode|Low Power Mode]]''' functionality added
| |
| * '''NEW!''' MQTT support for '''[[Getting_Started_with_AWS_IoT_Core|AWS IoT Shadow/Custom]]''' and '''[[Getting_started_with_Azure_IoT_hub|Azure IoT]]''' added
| |
| * '''NEW!''' '''[[FMC125_RS-232_and_RS-485|RS485 Buffered]]''' functionality added
| |
| * '''NEW!''' '''[[FMC125_RS-232_and_RS-485|RS232 Delimiter mode]]''' functionality added
| |
| * '''NEW!''' '''[[{{{name|}}}_System_settings#The_1-wire_enabled_in_DS_and_ODS|1-Wire interface control in sleep modes]]''' functionality added
| |
| * '''NEW!''' '''[[{{{name|}}}_System_settings#BT.2FBLE_module_OFF_during_Sleep_modes|BT/BLE interface control in sleep modes]]''' functionality added
| |
| * '''NEW!''' '''[[NBL-2|NBL-2 Bluetooth RFID reader]]''' support added
| |
| * '''NEW!''' SMS/GPRS command '''[[FMB_lvcanhorn|"lvcanhorn"]]''' support added
| |
| * '''NEW!''' Added support for '''[[FMC13A|FMC13A]]''' and '''[[FMM13A|FMM13A]]'''
| |
| * '''NEW!''' Added support for '''[[FMC00A|FMC00A]]''' and '''[[FMM00A|FMM00A]]'''
| |
| * '''NEW!''' Added support for '''[[FMC920|FMC920]]''' and '''[[FMM920|FMM920]]'''
| |
| * '''NEW!''' Added support for '''[[FMC003|FMC003]]''' and '''[[FMM003|FMM003]]'''
| |
| * '''NEW!''' Added support for small OBD devices '''[[FMB003|FMB003]]''' and '''[[FMB020|FMB020]]'''
| |
| * '''NEW!''' Added support for FMC1XY/FMC2XY devices with MeiG modems
| |
| * '''NEW!''' SMS/GPRS command '''[[FMB_setigndigout|"setigndigout"]]''' added
| |
| * '''NEW!''' Jamming feature support added for FMC1XY/FMC2XY devices with MeiG modems
| |
| * '''NEW!''' Support of new electric vehicle '''[[{{{name|}}}_Parameter_list#OBD_II_.28Bluetooth.29|OEM parameters]]''' for FMX00X devices
| |
| * '''NEW!''' '''[[{{{name|}}}_Parameter_list#LVCAN|CAN service and LPG I/O elements]]''' added
| |
| * '''NEW!''' New I/O elements for each CAN adapter state flag added
| |
| * '''NEW!''' New I/O Digital Input 2 for FMX920, FMB910 and FMB900 devices
| |
| * '''CHANGED!''' Reworked recalibration logic
| |
| * '''CHANGED!''' '''[[Parameters_Update|Default parameter values]]'''
| |
| * '''CHANGED!''' '''[[{{{name|}}}_SMS_events|SMS Event]]''' logic reworked
| |
| * '''CHANGED!''' '''[[FMC125_RS-232_and_RS-485#LLS_mode|LLS address]]''' count expanded to 16
| |
| * '''CHANGED!''' Black list functionality reworked
| |
| * '''CHANGED!''' SMS/GPRS command '''[[FMB_cpureset|"cpureset"]]''' protection functionality
| |
| * '''CHANGED!''' '''[[Advanced_Pulse_Counter|Pulse Counter]]''' reworked | |
| * 1-Wire Temperature sensor stability improvements
| |
| * Operator search procedure functionality improvements
| |
| * Record saving and sending improvements
| |
| * DOUT state saving improvements
| |
| * GPRS Session and PDP Context Activation logic improvements
| |
| * Trip state saving improvements
| |
| * CAN data reading improvements
| |
| * BLE data reading stability improvements
| |
| * TimeSync, SMS handling and connection stability improvements for FMC1XY/FMC2XY devices with MeiG modems
| |
| * AutoAPN multiple block file improvement for larger database capacity
| |
| * Manufacture testing improvements
| |
| * Improved system stability and fixed general bugs
| |
| |-
| |
| {| class="wikitable" style="width: 100%;"
| |
| |+
| |
| |style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.27.14.Rev.00">{{{fw|'''03.27.14.Rev.00'''}}}</span><br /> (recommended for FMB120, FMB130, FMB920)
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2022.11.01}}}
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| * '''1-wire interface optimization''' | |
| * New accelerometer component support added
| |
| * Improved system stability and fixed general bugs
| |
| |-
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.27.13.Rev.03">{{{fw|'''03.27.13.Rev.03'''}}}</span><br /> (recommended for FMT100, FMB1XY, FMB0XY, FMB2XY, FMB9XY, FMM130, FMC001)
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2022.08.01}}}
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| * Improved system stability and fixed general bugs
| |
| |-
| |
|
| |
|
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.27.13.Rev.01">{{{fw|'''03.27.13.Rev.01'''}}}</span><br /> (recommended for FMM001)
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2022.04.06}}}
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| * Manufacture testing improvements
| |
| * Improved system stability and fixed general bugs
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.27.12.Rev.00">{{{fw|'''03.27.12.Rev.00'''}}}</span><br /> (recommended for FMC001)
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2022.02.09}}}
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| * Preferred Operator functionality improvements
| |
| * SLM320 modem support added
| |
| * BLE advanced beacon improvements
| |
| * Static navigation improvements
| |
| * GNSS improvements
| |
| * New OBD Data MCU support added
| |
| * Improved system stability and fixed general bugs
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.27.07.Rev.00">{{{fw|'''03.27.07.Rev.00'''}}}</span><br /> (recommended for FMB9X0, FMB204, MTB100)
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |{{{release_date| 2021.08.02}}}
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| {{{changes|*'''New Flash memory component support added'''
| |
| {{{DOUT|*'''[[{{{model|}}}_Features_settings#DOUT_1_Output_Type|Inverted DOUT]]''' functionality added }}}
| |
| *'''[[{{{model|}}}_Beacon_List#Advanced_Beacon_Mode_.28Universal_Beacons.29|'''Universal Beacons''']]''' functionality added
| |
| *Added [[{{{model|}}}_Beacon_List#Beacon_On_Change|'''Beacon On Change''']] functionality
| |
| *Beacons list expanded to support 50 beacon ID's
| |
| *'''[[{{{model|}}}_Bluetooth®_4.0_settings#BLE_Serial_Encryption|BLE AES128]]''' encryption added
| |
| *Added '''[[{{{model|}}}_Features_settings#Ignition_ON_Counter|Ignition On Counter]]''' functionality
| |
| *Added '''[[{{{model|}}}_Bluetooth®_4.0_settings#Supported_Sensors_List|BLE Efento sensor]]''' support
| |
| *Added '''[[{{{model|}}}_GPRS_settings#TLS.2FDTLS|encrypted record]]''' support (TLS)
| |
| *Added '''[[{{{model|}}}_GSM_Operators_settings#Ban_List_Control|Ban list control]]''' functionality
| |
| *[[{{{model|}}}_GPRS_settings#Second_Server_Settings|'''EGTS protocol''']] support added
| |
| *Added configurable '''[[{{{model|}}}_GPRS_settings#Records_Settings|ACK type (TCP/AVL)]]''' source feature
| |
| *'''[[{{{model|}}}_Features_settings#Advanced_Eco_Driving|Advanced eco driving]]''' for all hardware
| |
| *'''Matrix3 RFID''' support added
| |
| {{{DOUT|*[[{{{FMB1XY |FMB120 }}} 1-Wire#iButton list|'''iButton list''']] extended to 4000 iButtons}}}
| |
| *Device records saving/sending improvements
| |
| *Towing scenario improvements
| |
| *SMS Data Sending improvements on events generation
| |
| {{{DOUT|*SMS commands '''[[FMB setdigout|setdigout]]''' and '''[[FMB readio|readio]]''' sending improvements}}}
| |
| *Time synch from NTP/NITZ improvements
| |
| *Device wake up from sleep modes improvements
| |
| *HW with eSIM feature general working improvements
| |
| *Can adapters data reading on ignition off/on improvements
| |
| *Can adapters settings over SMS commands improved
| |
| *General device debug logs capture improvements
| |
| *BLE whitelist (scan stability improvements)
| |
| *Battery protection improvements
| |
| *Improved system stability and fixed general bugs}}}
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.18.Rev.08">'''03.25.18.Rev.08'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2021.04.30
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *internal GNSS chip firmware update<br>
| |
| *Improved AutoAPN feature<br>
| |
| |-
| |
|
| |
|
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.18.Rev.05">'''03.25.18.Rev.05'''</span><br />
| | '''<u>Prerequisites and important Settings</u>'''<br> |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2021.02.26
| | * If the device is remounted, send the DR_Reset SMS command and perform a full recalibration. This ensures all orientation- and sensor alignment parameters are refreshed, preventing inaccurate Dead Reckoning calculations after the installation change. |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *AutoAPN improvements<br>
| |
| *Odometer calculation from CAN adapters data improvements<br> | |
| *Improved system stability and fixed general bugs
| |
|
| |
|
| |-
| | '''<u>Basic Operation</u>'''<br> |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.15.Rev.01">'''03.25.18.Rev.03'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2020.12.28
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Fix data type for BLE Sensor Custom <br>
| |
| *Record data sending improvements <br>
| |
| *Records saving and sending logic improved <br>
| |
| *Improved system stability and fixed general bugs
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.15.Rev.01">'''03.25.15.Rev.32'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2020.07.21
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *[[Auto APN feature for FM trackers|Auto APN]] functionality added to base firmware.
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.15.Rev.01">'''03.25.15.Rev.02'''</span><br /> (recommended for FM30XY)
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2020.02.17
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved Green Driving feature parameter sending.
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.15.Rev.01">'''03.25.15.Rev.01'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2020.01.22
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Records saving and sending logic improved.
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.14.Rev.00">'''03.25.14.Rev.05'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.12.23
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *UL202 Fuel level sensor support improvements, status IO changed from (AVL ID 328) to (AVL ID 483)
| |
| *Odometer accuracy improvements when the Odometer Calculation Source is selected as the LVCAN
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.14.Rev.00">'''03.25.14.Rev.03'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.11.27
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *'''[[FMB120_Beacon_List|BLE beacons]]''' '''and''' '''[[FMB120_Bluetooth®_4.0_settings#Bluetooth_4.0_settings|BLE sensors]]''' support added to base release
| |
| *'''[[FMB120_Accelerometer_Features_settings#Auto_calibration_rework_and_improvements_from_firmware_version_03.25.07.Rev.00.|Autocalibration]]''' reworked and improved
| |
| *New '''[[FMB120_Parameter_list|IO element]]''': Coordinates according to '''[[ISO6709|ISO6709]]'''
| |
| *Added '''[[FMB120_System_settings#Multiple_Movement_Sources|Multiple movement source]]''' selection
| |
| *'''[[FMB120_Features_settings#Eco.2FGreen_Driving|Advanced eco driving]]''' selections added for '''FMT100'''
| |
| *'''[[FMB920_Tracking_on_Demand|On demand tracking]]''' feature added
| |
| *Added '''[[FMB920_Tracking_on_Demand|On demand tracking]]''' activation by AIN1/DIN1
| |
| *'''[[FMB120_System_settings#New_time_synchronization_method_implementation.2A|Time synchronization]]''' algorithm changed
| |
| *'''DOUT Control Via Ignition and DOUT Control Via CALL functionalities has been merged'''
| |
| *DIN3 can now be selected as an ignition source
| |
| *OBD II data reading improvements
| |
| *Bluetooth dongle OBD data reading improvements
| |
| *Wake up from ultra-deep sleep improved
| |
| *TZBT sensors data reading improvements
| |
| *Devices with eSIM communication improvements
| |
| *Operators List feature improvements
| |
| *CAN adapters data reading improvements
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.07.Rev.00">'''03.25.07.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.06.10
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *One wire data reading improvements
| |
| *Manual geofence configuration improvements
| |
| *Data sending in online deep sleep mode optimization
| |
| *[[FMB120_Features_settings#DOUT_Control_Via_Ignition| DOUT Control via Ignition]] implementation
| |
| *OBD data reading improvements
| |
| *SMS command btgetlist improvements
| |
| *Periodic sending optimization
| |
| *Changed setdigout command response to "DOUT is disabled from CFG" if DOUT is disabled configuration
| |
| *Improved SMS responses
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.25.05.Rev.00">'''03.25.05.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.05.06
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *'''Added FMB207 support'''
| |
| *'''Added FMB964 support'''
| |
| *'''Added FMB130 support'''
| |
| *'''Added BT3 auto connection mode "User ID"'''
| |
| *'''Added UL202-02 fuel sensors functionality'''
| |
| *Improved record sending to backup
| |
| *Added DOUT3 control for scenarios with FMB130 hardware
| |
| *Improved OBD CAN reading
| |
| *Add "Always" battery charge mode
| |
| *Added codec14 protocol support
| |
| *GPS Acquisition improvements
| |
| *Improved duplicate lvcan parameters
| |
| *OBDII improvements, for ignition off detection and protocol changing
| |
| *Add RS485 parity selection
| |
| *Improved ECO driving functionality I/O elements manipulation
| |
| *Added [[Impulse_counter|impulse counter]] support for FMB130
| |
| *Added FW downgrade protection
| |
| *Rename BT user ID I/O element text default value
| |
| *Added [[FMB120 Bluetooth settings|composed Bluetooth name]] functionality
| |
| *Changed minimum & default geofence zone radius to 5 meters
| |
| *GPS status update
| |
| *Improved Eco Driving detection for FMB20X devices
| |
| *Improved baud rate change
| |
| *Change Default Time Synchronization value to Disable (GNSS only)
| |
| *getops SMS command added
| |
| *Only Half ICCID sent to server on ICCID event improvement
| |
| *bt getlist improvement
| |
| *Added BLE connection control functionality, when service id is configured
| |
| *Use speed if LVCAN/OBD speed is 0
| |
| *Improved record generating when speed source is configured as OBD/CAN
| |
| *Added speed source configuration parameter for scenarios where vehicle speed is needed
| |
| *Improved speed jump filter
| |
| *Crash trace improvements
| |
| *Changed "obdinfo" sms response - returns LAST detected OBD protocol now
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.18.21.Rev.00">'''03.18.21.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.02.28
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved OBD data reading
| |
| *Changed "obdinfo" sms response
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.18.20.Rev.00">'''03.18.20.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.02.21
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved Ultra Deep sleep mode
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.18.19.Rev.00">'''03.18.19.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2019.01.14
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved FMB207 support
| |
| *Improved simultaneous DNS requests issue (DNS fails if requesting at same time). Do not affects FM3/FM4 with ext modem
| |
| *Improved path creating for NMEA logging file (after sdformat)
| |
| *OBD & ELD improvements
| |
| *1-Wire Dallas temperature sensors improvements
| |
| *Do not allow unauthorized incoming calls if any authorized number is configured
| |
| *VIN reset/change on ELD improved
| |
| *Changed default battery level sms text to "Battery level %"
| |
| *Improved CODEC12 CMD server -> RS232/RS485 data length
| |
| *CAN interrupt handling reworked
| |
| *Improvement for putting space to APN configuration then it's empty and sim is inserted
| |
| *Improved DOUT control over SMS when no DOUTs are enabled
| |
| *Reworked external modem power off/on procedures
| |
| *Changed SMS cmd "getgps" time source, to prevent zero values when GPS is OFF
| |
| *GSM numbers handling rework
| |
| *Improvement for Bluetooth communication over BT 3.0
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.18.16.Rev.00">'''03.18.16.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.12.04
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Changed default configuration '''[[Default values changes since FMB firmware version 03.18.16.rev.00|parameters]]''' values
| |
| *Improved SIM switch algorithm for DUAL-SIM devices (FMB125, FMB122)
| |
| *Added possibility to set [[LV-CAN200|LV-CAN200]], [[ALL-CAN300|ALL-CAN300]], [[CAN-CONTROL|CAN-CONTROL]] program number using SMS command in Online Deep Sleep mode
| |
| *Improved RS485 LLS reconfiguring on different positions
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="03.18.15.Rev.00">'''03.18.15.Rev.00'''</span><br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.11.26
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *The conditions for entering sleep depend on this parameter:<br /> Always / After Time Sync / After Position Fix
| |
| *Improved records reading and sending
| |
| *Fixed Total Odometer IO values appearing in Trip Odometer IO
| |
| *Fixed unexpected GPS LED blinking after wake up from sleep
| |
| *UDP data sending improvements
| |
| *Fixed CAN CONTROL speed I/O element value parsing
| |
| *Fixed Battery Voltage I/O coefficients
| |
| *Improved Crash Detection duration calculation
| |
| *Changed odometer configuration parameter available min value to 0, while on TCP configuration values is from 1
| |
| *Improved auto calibration algorithm
| |
| *Improved data sending algorithm
| |
| *Removed forced record sending after waking up from deep sleep
| |
| *Fixed ELD data sending via BLE
| |
| *ELD speed source selection improvements
| |
| *Fixed BLE temperature sensors I/O low level configuration
| |
| *Changed odometer source switching algorithm (OBD<->GNSS). If OBD data becomes unavailable device will not switch to GNSS source automatically
| |
| *Improved crash data packing
| |
| *Fixed SMS "odoset:" max value validation
| |
| *Fixed device restarts due too many BLE devices in range when performing scanning operation
| |
| *Improved LLS data reading stability
| |
| *Changed "Engine Oil Temperature" OBD IO element value representation from SIGNED to UNSIGNED
| |
| *Increased Odometer max value from 999999 to 4294967
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.18.03.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.09.25
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Fixed AIN1 and External Voltage swap for FMB900
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.18.02.Rev.00'''<br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.09.24
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Added shadow calibration functionality
| |
| *Improved eco driving events functionality
| |
| *Improved GNSS hdop&pdop validation
| |
| *Fixed LVCAN Fuel Level value coefficient according to IO protocol
| |
| *Added Battery level % IO element
| |
| *Fixed gps fix acquisition
| |
| *Added Configurable BLE transmitting power
| |
| *Added ELD support into base OBD FW version
| |
| *Improved communication with FOTA WEB
| |
| *Reworked IO manager to properly support variable length of IO
| |
| *Improved operation in Deep Sleep
| |
| *Improved records packing
| |
| *Improved crash records generation.
| |
| *Improved FW startup speed
| |
| *Increased Trip status reading from BTAPP rate
| |
| *Improved Idling functionality
| |
| *Fixed duplicated record issue
| |
| *Improved Bluetooth scanning functionality
| |
| *Added OBD DTC, LVCAN DTC IO elements
| |
| *Improved Power consumption in sleep mode
| |
| *Fixed incomming call detection
| |
| *Improved records saving scenario
| |
| *Added MIN SPEED protections for ECO DRIVING
| |
| *Improved RS232 operation after device initialization
| |
| *Improved TZBT data reading
| |
| *Improved eco/green driving and crash detection functionalities
| |
| *Max packet size increased from 1024 bytes to 1280 bytes
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.10.09.Rev.00'''<br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.07.03
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved LiPo battery detection
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.10.08.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.06.25
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Fixed FOTA WEB hardware detection
| |
| *Improved SMS/GPRS command "setdigout" with speed parameter according to documentation (do not trigger DOUTx if GNSS FIX unavailable)
| |
| *Added ELD VIN number validation
| |
| *Fixed OBD and LVCAN IO current value showing in configurator
| |
| *Fixed record sending if mode was changed and send period “0”
| |
| *Added FMB125 BLE DualSIM HW support
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.10.03.Rev.00'''<br />
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.05.31
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Added TZ-BT05B sensor support
| |
| *Improved BLE scanning
| |
| *Improved data sending scenario
| |
| *Fixed configuration loading after download via FOTAWEB issue
| |
| *Improved DOUT functionality
| |
| *Added CAN-CONTROL support
| |
| *Changed LVCAN Engine Temperature and LVCAN Fuel Level value coefficient (according IO protocol)
| |
| *Added new SMS/GPRS command "getimsi" for IMSI number reading
| |
| *Added ELD functionality
| |
| *DNS support improvement
| |
| *Stability improvements
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.09.01.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.04.30
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved FOTA WEB functionality
| |
| *Improved odometer value calculating from LVCAN (km->m)
| |
| *Improved 1-wire operation with long wires
| |
| *Improved Bluetooth functionality
| |
| *Improved OBD data reading
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.08.05.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.04.18
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved Static Navigation filter
| |
| *Improved Crash Detection scenario
| |
| *Improved device connection to configurator after FW update
| |
| *Updated LVCAN protocol to support 4 and 5 digits numbers
| |
| *BT functionality optimization
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.07.07.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.04.05
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved simultaneous use of several Bluetooth connections
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.07.06.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.03.19
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Fixed IO elements High/Low config parameters negative values saving
| |
| *Improved OBD communication
| |
| *Improved Outgoing Call trigger conditions
| |
| *Improved VIN reading
| |
| *Record saving optimization
| |
| *Improved iButton expire time calculation
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.07.01.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.03.02
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *OBD pinout for FM3 improvement
| |
| *Improved data sending
| |
| *Improved FOTA WEB configuration sending
| |
| *Changed GPS state values reporting in SMS "getinfo" according documentation
| |
| *Improved Crash Detection
| |
| *Added GPRS OPEN timeout for FOTA WEB
| |
| *Improved UNLOCK key generation for keyword restoring
| |
| *LiPo battery charging optimization
| |
| *'''Added FMB2YX hardware support'''
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.06.04.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.02.12
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved record storing and sending algorithm
| |
| *Improved communication with accelerometer
| |
| *Improved firmware update handling with internal flash memory
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.06.01.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.01.29
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *'''BLE functionality added'''
| |
| *Improved OBD request functionality
| |
| *Improved record search and sending scenario
| |
| *Fixed SD storage (used/total) info displaying
| |
| *Added OBD stuck protection
| |
| *Improved logging
| |
| *Improved movement detection in sleep modes
| |
| *'''Added SMS "getrecord" for High prio record generation'''
| |
| *Added fix for GPRS authentication pap/chap
| |
| *'''Added Ultra Deep Sleep functionality'''
| |
| *Improved LiPo charging algorithm
| |
| *'''Added support of FM30XY hardware'''
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.03.07.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.01.03
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *'''New parameter for SMS event compositor: %gmap – provides Google Maps link in SMS event message'''
| |
| *Improvement for OBD data display in Configurator Status window
| |
| *Improved Ignition and Movement detection by CAN data (OBD/LVCAN)
| |
| *Improved iButton IO event generation after sleep mode
| |
| *Fixed Trip odometer precision when counting mode is “Between records”
| |
| *Fixed “setdigout” command usage on FMB9YX
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.03.06.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2018.01.03
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Fixed GPS speed value
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.03.03.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.12.05
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Added iButton ID inversion to solve incompatibility with FMA
| |
| *Added additional iButton family ID’s
| |
| *Improved backup server triggering if main server DNS request fails
| |
| *Removed Ios generation in deep/online sleep for EcoScore, Dallas Temp/ID, iButton, RFID, LLS
| |
| *Enabled GSM I/O’s in online sleep
| |
| *Added setdigout dependency on speed. DOUT change is not executed while speed is too high.
| |
| *GPS version string truncated in “getver” SMS response
| |
| *Movement detection sensitivity decreased
| |
| *Improvement in records manager to prevent records corruption
| |
| *High priority events are not checking to send period now
| |
| *Towing IO reset on feature reactivation added
| |
| *Fixed FOTA WEB issue when APN has login and password
| |
| *'''Major stability improvement patch!'''
| |
| *Added immobilizer state restore on startup
| |
| *SMS sending is now aborted after 3 unsuccessful attempts
| |
| *'''SMS events text composition added.''' You can add additional parameters to SMS text
| |
| *Improved HID RFID reading in FMB125
| |
| *'''Added Green Driving Duration IO element (AVL ID: 243)'''
| |
| *Fixed SIM PIN change via Bluetooth
| |
| *'''RS232 buffered modes added'''
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.02.03.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.10.17
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Updated GPS FW (Galileo satellites are used now too)
| |
| *Auto calibration procedure improved
| |
| *Added new LV-CAN200 parameters: CNG Status, CNG Used, CNG Level, OIL Level, Engine Temperature
| |
| *Added “getimeiccid” SMS/GPRS command
| |
| *IMEI packaging for UDP fixed
| |
| *Crash Trace fixed
| |
| *BTAPP application improvement
| |
| *OBD PID data requesting when VIN unavailable fixed
| |
| *Fake overspeeding events are now filtered out
| |
| *Fixed BT name autogenerating if empty
| |
| *Fixed records sending via UDP
| |
| *Autoconnect to FotaWeb on power ON and after “cpureset“ added
| |
| *OBD protocol detection improvements
| |
| *GNSS (used for records) data while device is in GPS sleep / deep sleep / online deep sleep fixed
| |
| *Changed BT DEFAULT name autogeneration by device type
| |
| *Improved SD present and mounted state detection
| |
| *Removed check for AIN min value 500mV
| |
| *Records sending by min saved records fix
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''03.01.04.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.09.06
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *New feature: NMEA via Bluetooth
| |
| *New feature: Read records
| |
| *New feature: iButton reading notification via DOUT.
| |
| *New SMS/GPRS command: getvin (Returns vehicle VIN number. Aplicable for FMB001, or other FMB devices with connected OBDII dongle)
| |
| *BTAPP protocol updated
| |
| *Improvements in records sending (fixes increased traffic usage)
| |
| *Improved configuration saving time
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.03.13.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.11.07
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved overall device stability
| |
| *Fixed Bluetooth Data Link.
| |
| *Fixed Bluetooth name auto-generating if empty.
| |
| *Fixed Bluetooth clear all Paired device list from configurator.
| |
| *Fixed records sending via UDP.
| |
| *Fixed IMEI packaging for UDP.
| |
| *Improved SMS login/pass validator. All characters are now allowed.
| |
| *Added protection for OBD Odometer value reset.
| |
| *Added protection for IMEI corruption.
| |
| *Fixed bad records detector.
| |
| *Added call functionality (when event detected) in Deep Sleep mode.
| |
| *Restart protection fixed.
| |
| *Improvements in SIM PIN setting.
| |
| *Changed default FOTA WEB Domain.
| |
| *Fixed OBD PID data requesting when VIN unavailable.
| |
| *OBD protocol detection improvements.
| |
| *Modem power ON improvements.
| |
| *NTP improvements.
| |
| *Added “getimeiccid” SMS/GPRS command.
| |
| *SMS/GPRS command “sdformat” improvements.
| |
| *SMS Login/Pass validator improvements.
| |
| *Removed check for AIN min value 500mV.
| |
| *Added additional IO High/Low-level setter by ParamID.
| |
| *Fixed SMS processing state check in modem SLEEP mode setter.
| |
| *FOTA functionality improvement.
| |
| *Added protections by GSM number and text length.
| |
| *IO event External Voltage DeltaChange improvements.
| |
| *Fixed issues with double records, bad records, record search.
| |
| *Fixed microSD to RAM switching for records saving.
| |
| *Added retries for unsuccessful outgoing call.
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.03.11.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.10.19
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Fixed Crash detection functionality.
| |
| *Battery charging improvement.
| |
| *Record sending via UDP fixed.
| |
| *Record sending in DeepSleep improvement.
| |
| *FOTA WEB functionality improvement.
| |
| *Added protection for IMEI corruption.
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |<span class="mw-headline" id="01.03.03.Rev.00">'''01.03.03.Rev.00'''</span>
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.07.24
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Added FOTA WEB functionality
| |
| *Optimization of power consumption in sleep modes
| |
| *GNSSS IO Text "GNSSpower" changed to "GNSSStatus"
| |
| *Added zero filling the ibutton values
| |
| *Enabled IOs GNSS, Total Odometer in dsleep mode
| |
| *Improved getio SMS response for FMB125
| |
| *Added CCID validity check before PIN registration
| |
| *Minimized power consumptions in sleep modes
| |
| *Added SD card check before it’s usage
| |
| *Changed excessive idling default/max values
| |
| *DUAL SIM functionality implementation
| |
| *PIN Entering to second SIM improvement
| |
| *SMS/GPRS getgps command improvement
| |
| *Added dual server support
| |
| *Operator Black list implementation
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.32.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.07.10
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Authorized GSM numbers list increased to 200
| |
| *Unplug feature improvement
| |
| *SMS command 'sdformat' – deletes all internal memory
| |
| *SMS command ‘deleterecords’ – deletes Avl records from memory
| |
| *Faster GPS FIX after leaving sleep mode
| |
| *‘odoset’ SMS command fixed
| |
| *Excessive Idling functionality improvement
| |
| *DOUT state is restored on startup
| |
| *Towing activation timeout max value increased
| |
| *Averaging now works in Deep Sleep mode too
| |
| *Minor OBD improvements
| |
| *Bluetooth pairing improvements
| |
| *FMB962/FMB964 hardware support added
| |
| *Records sending when link is open fixed
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.30.Rev.05'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.05.26
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Added 5 geozones functionality
| |
| *IO elements ICCID and SD Status are added
| |
| *Added Keyword functionality
| |
| *Crash detection improvement, now it detects consecutive events
| |
| *Towing Detection improvement
| |
| *Unplug detection improvement
| |
| *GPRS connection stability improvement
| |
| *Improved Unplug detection – now detects “plug” events too
| |
| *Data sending without microSD card
| |
| *getgps SMS commands format fixed
| |
| *Default configuration changed – allow sending in roaming and unknown modes
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.22.Rev.12'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.04.13
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved connection to GSM operators
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.22.Rev.11'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.04.07
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Improved LiPo battery charger state interpretation
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.22.Rev.09'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.03.28
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Updated GPS firmware version
| |
| *Hardware detection improvement
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.22.Rev.06'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.03.14
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Corrected “Green driving” values: “m/s2” conversion to “g”
| |
| *SIM PIN entering fixed.
| |
| *SMS Reading improved. Don't go to DeepSleep if there are SMS to read in memory.
| |
| *GPS Fuel Counter fix.
| |
| *Jamming detection improvement.
| |
| *AutoGeofence functionality improvement.
| |
| *Entering to DeepSleep fixed
| |
| *IO elements “event only” parameter fix
| |
| *Improvement in connection to GSM operator
| |
| *Added SD card drive capacity parameter to Status window
| |
| *Added BeiDou satellite numbers
| |
| *Trip odometer I/O calculation improvement.
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.19.Rev.02'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.01.18
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *OBD data, VIN, DTC error count reading, DTC PID's requests, DTC delete via Bluetooth
| |
| *Fixed GPS no fix lock-up
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.17.Rev.03'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2017.01.06
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Bluetooth Voice call added
| |
| |-
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |'''01.00.15.Rev.00'''
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: center; vertical-align: center; background: white;" |2016.11.23
| |
| | style="border: 1px solid white; border-bottom: 2px solid #E8E8E8; text-align: left; vertical-align: center; background: white;" |
| |
| *Accelerometer axis values XYZ as IO elements
| |
| *Configuration send/save over Bluetooth
| |
| *NTP+NITZ Time synchronization
| |
| *EcoDriving auto-calibration
| |
|
| |
|
| |} | | '''Entering Standby Mode''' |
| | |
| | The device can enter Standby Mode in two scenarios: |
| | * No movement detected |
| | If the device detects absence of movement, Dead Reckoning enters Standby Mode after the timeout defined by '''Standby timeout (ID 124)''' elapses. |
| | * Device enters sleep mode |
| | When the device transitions into sleep mode, the GNSS receiver is switched to power saving mode. |
| | |
| | Before GNSS powers down, Dead Reckoning enters Standby Mode '''immediately''', the scenario is paused, and the device proceeds into sleep mode. |
| | |
| | '''Exiting Standby Mode''' |
| | |
| | Standby Mode can be exited in the following cases: |
| | * Movement is detected |
| | When movement is detected, the device exits Standby Mode and resumes normal Dead Reckoning operation. If '''no movement is detected''', Dead Reckoning remains in Standby Mode. |
| | |
| | |
| | === <u>Key Performance Indicators (based on performed tests)</u> === |
| | * '''GNSS denied operation (1 km)''' |
| | ** When driving 1 km without a GNSS signal (including 15–20 turns), the positional error is ≤ 25 m, achieved in at least 8 out of 10 field tests.<br> |
| | ** Dead Reckoning continues operating beyond 1 km; however, positional error may increase after this threshold.<br> |
| | |
| | * '''Recovery after DR Standby (Sleep Mode)''' |
| | ** After exiting DR Standby (Sleep Mode), the system correctly reconstructs the driven route for up to 5 minutes or 1000 m, with a positional error of ≤ 50 m, achieved in at least 8 out of 10 field tests.<br> |
| | |
| | * '''Real world driving variability''' |
| | ** Real world driving conditions may vary and can impact performance results. |
| | |
| | === <u>Limitations, Edge Cases & Additional Notes</u> === |
| | There are some important things to keep in mind when using the Dead Reckoning functionality. The algorithm tries to correct for these issues, but sometimes they can still affect how well Dead Reckoning works. |
| | * '''Loss of alignment during drifting''' – Dead Reckoning alignment will be lost during drifting, when the actual movement vector does not correspond to the vehicle heading. Re‑alignment is required. |
| | * '''Overshooting''' - May occur when the vehicle travels straight for more than 50 m at speeds below 20 km/h. In such cases, positional overshoot may be observed. An example is shown in the attached image. |
| | [[File:Dead Reckoning - Overshooting.png|300px|link=Special:Redirect/file/Dead Reckoning - Overshooting.png]] |
| | * '''Position accuracy may decrease''' - If the device cannot receive a GNSS signal for a long time, the estimated position may become less accurate. This is because the sensors inside the device can only estimate the position for a limited time without help from GNSS. |
| | For example: If a courier spends up to 30 minutes unloading in the underground car park, DR will remain accurate. Otherwise, positioning information will become less accurate. |
| | * '''Temperature effects''' - The accuracy of the position can change if the temperature is very different from when the device was last calibrated. |
| | * '''Alignment reset''' - If the device loses power or goes into sleep mode, it will need to be calibrated again. |
| | |
| | '''Tip:''' If alignment auto-save is enabled, realignment will be faster. |
| | |
| | * '''Position jumps after GNSS outages''' - Multipath occurs when reflected or diffracted GNSS signals reach the receiver, causing position errors. Since Dead Reckoning depends on GNSS for continuous correction, these multipath induced inaccuracies can lead to visible position jumps, especially in urban areas with tall buildings or obstructions. |
| | [[File:GNSS Multipath.png|350px]] |
| | |
| | === <u>AVL ID list</u> === |
| | <table class="nd-othertables_2" style="width:100%; border-collapse: collapse;"> |
| | <tr> |
| | <th style="width:8%; vertical-align: middle; text-align: left;">Property ID in AVL packet</th> |
| | <th style="width:15%; vertical-align: middle; text-align: center;">Property Name</th> |
| | <th style="width:5%; vertical-align: middle; text-align: center;">Bytes</th> |
| | <th style="width:10%; vertical-align: middle; text-align: center;">Min Value</th> |
| | <th style="width:10%; vertical-align: middle; text-align: center;">Max Value</th> |
| | <th style="width:5%; vertical-align: middle; text-align: center;">Multiplier</th> |
| | <th style="width:5%; vertical-align: middle; text-align: center;">Units</th> |
| | <th style="width:32%; vertical-align: middle; text-align: left;">Description</th> |
| | </tr> |
| | <tr> |
| | <td style="vertical-align: middle; text-align: center;">1433</td> |
| | <td style="vertical-align: middle; text-align: center;">Dead Reckoning alignment status</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">0</td> |
| | <td style="vertical-align: middle; text-align: center;">99</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;"> </td> |
| | <td style="vertical-align: middle; text-align: center;">[[{{{model}}}_System#Dead_Reckoning_alignment_status|Dead Reckoning alignment status]]</td> |
| | </tr> |
| | <tr> |
| | <td style="vertical-align: middle; text-align: center;">1434</td> |
| | <td style="vertical-align: middle; text-align: center;">Turning alignment</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">0</td> |
| | <td style="vertical-align: middle; text-align: center;">100</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">%</td> |
| | <td style="vertical-align: middle; text-align: center;">[[{{{model}}}_System#Turning_alignment|Turning alignment]]</td> |
| | </tr> |
| | <tr> |
| | <td style="vertical-align: middle; text-align: center;">1435</td> |
| | <td style="vertical-align: middle; text-align: center;">Straight alignment</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">0</td> |
| | <td style="vertical-align: middle; text-align: center;">100</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">%</td> |
| | <td style="vertical-align: middle; text-align: center;">[[{{{model}}}_System#Straight alignment|Straight alignment]]</td> |
| | </tr> |
| | </table> |
| | |
| | === <u>Parameter list</u> === |
| | <table class="nd-othertables_2" style="width:100%; border-collapse: collapse;"> |
| | <tr> |
| | <th style="width:8%; vertical-align: middle; text-align: left;">Property ID in AVL packet</th> |
| | <th style="width:15%; vertical-align: middle; text-align: center;">Property Name</th> |
| | <th style="width:5%; vertical-align: middle; text-align: center;">Bytes</th> |
| | <th style="width:10%; vertical-align: middle; text-align: center;">Min Value</th> |
| | <th style="width:10%; vertical-align: middle; text-align: center;">Max Value</th> |
| | <th style="width:5%; vertical-align: middle; text-align: center;">Multiplier</th> |
| | <th style="width:5%; vertical-align: middle; text-align: center;">Units</th> |
| | <th style="width:32%; vertical-align: middle; text-align: left;">Description</th> |
| | </tr> |
| | <tr> |
| | <td style="vertical-align: middle; text-align: center;">123</td> |
| | <td style="vertical-align: middle; text-align: center;">Alignment auto-save</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">0</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">This option saves calibration data to device memory, enabling a faster recalibration after device restart. <br> '''0''' = Disable <br> '''1''' = Enable </td> |
| | </tr> |
| | <tr> |
| | <td style="vertical-align: middle; text-align: center;">124</td> |
| | <td style="vertical-align: middle; text-align: center;">Standby timeout</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">65535</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">(s) seconds</td> |
| | <td style="vertical-align: middle; text-align: center;">The standby timeout is the time after which device will attempt to correct the position based on correction strategy.<br> Default value = '''1800''' </td> |
| | </tr> |
| | <tr> |
| | <td style="vertical-align: middle; text-align: center;">125</td> |
| | <td style="vertical-align: middle; text-align: center;">Standby mode</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">0</td> |
| | <td style="vertical-align: middle; text-align: center;">1</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">-</td> |
| | <td style="vertical-align: middle; text-align: center;">The standby mode is the mode in which the device will attempt to correct the position based on correction strategy. <br>'''0''' = Realignment<br>'''1''' = Preserve alignment</td> |
| | </tr> |
| | </table> |