|
|
| Line 1: |
Line 1: |
| | + | __TOC__ |
| | + | ==Trip Settings== |
| | + | |
| | + | [[Image:Fmb120_trip_settings.png|300px|right]] |
| | + | |
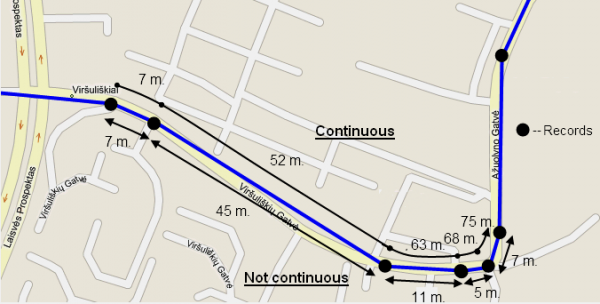
| | + | ''Trip'' section offers user to configure the ''Trip'' feature. ''Trip'' starts when Ignition according ''Ignition source'' is ON and Movement according ''Movement source'' is ON and also 'Start Speed' is exceeded. ''Start Speed'' defines the minimum GPS speed in order to detect ''Trip'' start.<br/>''Ignition OFF Timeout'' is the timeout value to detect ''Trip'' end once the Ignition (configured ignition source) is off.<br/>I/O Trip Odometer must be enabled to use ''Distance counting mode'' feature. When it is set to <span style=color:#F6A83E>Continuous</span>, ''Trip'' distance is going to be counted continuously (from ''Trip'' start to ''Trip'' end) and written to I/O ''Trip Odometer'' value field. When ''Trip'' is over and the next ''Trip'' begins, ''Trip Odometer'' value is reset to zero.<br/>When ''Mode'' is set to <span style=color:#F6A83E>Between Records</span>, the distance is going to be counted between every record made. This value is written to I/O ''Trip Odometer'' value field and is reset to zero every new record until the ''Trip'' ends. If later all Odometer values are summed up manually, the distance driven during the whole duration of the ''Trip'' can be obtained.<br/> |
| | + | |
| | + | [[Image:Fmb120_trip_mode.png|600px|none]] |
| | + | |
| | ==Advanced Trip Settings== | | ==Advanced Trip Settings== |
| | | | |
| Line 18: |
Line 27: |
| | * Very Bad 0 – 1.99<br/> | | * Very Bad 0 – 1.99<br/> |
| | | | |
| − | '''How Eco score is rated:'''<BR> | + | '''How Eco score is rated:''' |
| − | <BR> | + | |
| − | [[Image:Calculation_formula1.png|300px]]<BR>
| + | <math>ECO score = \cfrac{10}{\cfrac{Egen}{d\cfrac{Eallowed}{100}}}</math> |
| | | | |
| − | <BR>
| |
| | * Eallowed - ECO Score Allowed Events | | * Eallowed - ECO Score Allowed Events |
| | * d - trip distance traveled in KM | | * d - trip distance traveled in KM |
| − | * Egen - Total generated events<BR> | + | * Egen - Total generated events |
| − | <BR>
| |
| − | '''ECO score calculation example:'''<BR>
| |
| − | <BR>
| |
| − | [[Image:Calculation_example2.png|300px]]
| |
| − | | |
| − | [[Eco_score_example.xlsx]]<BR>
| |
| − | <BR>
| |
| − | | |
| − | '''How to configure ECO score:'''<BR>
| |
| − | <BR>
| |
| − | [[Image:Eco_score.gif|600px]]<BR>
| |
| − | <BR>
| |
| − | '''Eco score scenarios:'''<BR>
| |
| − | | |
| − | ==Green Driving==
| |
| − | | |
| − | {{{pic_greendriving|[[Image:Green driving.JPG|300px|right]]}}}
| |
| − | | |
| − | When vehicle parameters exceed the values of ''Max Acceleration'', ''Max Braking'' or ''Max Cornering'' parameters, the scenario is activated: a record is generated and digital output status is changed to 1 when configured. You can configure all three parameters in m/s<sup>2</sup> units. Scenario is activated until current Acceleration, Braking or Cornering value decreases below the set parameter value.<br/>Parameters used with ''Green Driving'' functionality are given in a table below.
| |
| − | | |
| − | <table class="nd-othertables" style="width: 68%;">
| |
| − | <tr>
| |
| − | <th style="width: 10%; text-align:left; vertical-align:middle; color:black">Parameter name</th>
| |
| − | <th style="width: 20%; text-align:center; vertical-align:middle; color:black">Description</th>
| |
| − | </tr>
| |
| − | <tr>
| |
| − | <td style="width: 8%; text-align:left;">Output Control</td>
| |
| − | <td style="width: 8%; text-align:left">Enable/Disable Green driving functionality and Activate/Deactivate DOUT.</td>
| |
| − | </tr>
| |
| − | <tr>
| |
| − | <td style="width: 8%; text-align:left">Max Acceleration</td>
| |
| − | <td style="width: 8%; text-align:left">Value which can be reached while accelerating without triggering harsh acceleration event.</td>
| |
| − | </tr>
| |
| − | <tr>
| |
| − | <td style="width: 8%; text-align:left">Max Braking Acceleration</td>
| |
| − | <td style="width: 8%; text-align:left">Value which can be reached while braking without triggering harsh braking event.</td>
| |
| − | </tr>
| |
| − | <tr>
| |
| − | <td style="width: 8%; text-align:left">Max Cornering Acceleration</td>
| |
| − | <td style="width: 8%; text-align:left">Value which can be reached while cornering without triggering harsh cornering event.</td>
| |
| − | </tr>
| |
| − | <tr>
| |
| − | <td style="width: 8%; text-align:left">Source</td>
| |
| − | <td style="width: 8%; text-align:left">Which source data will be collected from:
| |
| − | * '''GNSS''' - GPS Data will be used to detect harsh driving. (This algorithm was used in FM53, FM63 devices) <br>
| |
| − | * '''Accelerometer''' – Accelerometer data will be used to detect harsh driving. (This algorithm is from FMB device family). Accelerometer calibration needs to be performed with ''“auto_calibrate:set”'' command. <br>
| |
| − | * '''GNSS Algorithm A1''' – GPS data will be used to detect harsh driving. (This algorithm is used in FMA11 devices). The main difference from FM53 is cornering detection which uses advanced math to more precisely calculate harsh cornering value across different vehicle speeds. <br>
| |
| − | * '''Accelerometer Algorithm A1''' - Accelerometer data will be used to detect harsh driving. (This algorithm is used in FMA11 device family) <br>
| |
| − | <b>Note:</b> To use ''“Accelerometer Algorithm A1”'' option user need to install device as in Figure 1.
| |
| − | </td>
| |
| − | </tr>
| |
| − | </table>
| |
| − | | |
| − | {{#switch: {{{model|}}}
| |
| − | | FMC640 = {{{pic_accelerometerposition|[[Image:fmx6_axis.jpg|300px|right]]}}} [[{{{model|FMC}}}]] Device accelerometer position. (With positive Z axis pointing to Ground and antennas face forward in the vehicle). Before operation with the vehicle on level ground user must send “setacc” SMS.
| |
| − | | |
| − | | |
| − | | FMM640 = {{{pic_accelerometerposition|[[Image:fmx6_axis.jpg|300px|right]]}}} [[{{{model|FMM}}}]] Device accelerometer position. (With positive Z axis pointing to Ground and antennas face forward in the vehicle). Before operation with the vehicle on level ground user must send “setacc” SMS.
| |
| − | | |
| − | | |
| − | | FMC650 = {{{pic_accelerometerposition|[[Image:fmx6_axis.jpg|300px|right]]}}} [[{{{model|FMC}}}]] Device accelerometer position. (With positive Z axis pointing to Ground and antennas face forward in the vehicle). Before operation with the vehicle on level ground user must send “setacc” SMS.
| |
| | | | |
| | + | '''ECO score calculation example:''' |
| | | | |
| − | | FMM650 = {{{pic_accelerometerposition|[[Image:fmx6_axis.jpg|300px|right]]}}} [[{{{model|FMM}}}]] Device accelerometer position. (With positive Z axis pointing to Ground and antennas face forward in the vehicle). Before operation with the vehicle on level ground user must send “setacc” SMS.
| + | Example 1 |
| | | | |
| | + | <math>ECO score = \cfrac{10}{\cfrac{10}{100\cfrac{10}{100}}} = 10,00</math> |
| | | | |
| − |
| + | Example 2 |
| − | }}
| |
| − | ==Over Speeding==
| |
| | | | |
| − | {{{pic_overspeeding|[[Image:FMB640_overspeeding.png|300px|right]]}}} | + | <math>ECO score = \cfrac{10}{\cfrac{15}{100\cfrac{10}{100}}} = 6,66</math> |
| | | | |
| − | When vehicle speed exceeds configured maximum speed value the scenario is activated, an event record is generated{{{text_dout| and digital output status is changed to 1 when configured}}}.<br/>Scenario is active until detected speed decreases below the set parameter value.<br/>{{{over_speeding_dout|info}}}
| |
| − | DOUT1, DOUT2 or DOUT3 can be activated for a period of time to warn the driver. Output on-time is configured separately for each feature case. For more information please refer to [[DOUT_controls|DOUT controls]].
| |
| − | <br/><br/><br/><br/><br/>
| |
| | | | |
| − | ==Excessive Idling==
| |
| − |
| |
| − | {{{pic_idling|[[Image:Fmb640_excessive_idling.png|300px|right]]}}}
| |
| − |
| |
| − | If ignition (DIN1 or Power Voltage) is ON and vehicle is not moving, after configured time period FMx will generate event. When vehicle starts moving FMx after configured time period generate event that vehicle idle time ends. You can configure time it takes to turn on this scenario (Time to Stopped). Scenario is activated until vehicle starts moving and keeps moving (moving is detected only from accelerometer) for amount of time that is configured. You can configure time it takes to turn OFF this scenario (Time to Stopped). .
| |
| − | <br/><br/><br/><br/><br/><br/><br/><br/><br/><br/>
| |
| − |
| |
| − | <BR><BR><BR><BR>
| |
| − | ==High RPM==
| |
| − |
| |
| − | {{{pic_idling|[[Image:High_rpm.png|500px|right]]}}}
| |
| − |
| |
| − | Depends on High and Low threshhold. .
| |
| − | <br/><br/><br/><br/><br/><br/><br/><br/><br/><br/>
| |
| − |
| |
| − | <BR><BR><BR><BR>
| |
| | {| class="wikitable" style="border-style: solid; border-width: 0px" | | {| class="wikitable" style="border-style: solid; border-width: 0px" |
| | |+ | | |+ |
| Line 132: |
Line 60: |
| | | style="text-align: left; background: #F6F6FB;" | [[Image:Bw_nb.png|50px]] | | | style="text-align: left; background: #F6F6FB;" | [[Image:Bw_nb.png|50px]] |
| | | style="text-align: left; background: #F6F6FB;" | If RPM is enabled under OBD – events will be doubled. | | | style="text-align: left; background: #F6F6FB;" | If RPM is enabled under OBD – events will be doubled. |
| − | |-
| |
| − | | style="text-align: left; background: #F6F6FB;" | [[Image:Bw_nb.png|50px]]
| |
| − | | style="text-align: left; background: #F6F6FB;" | Lowering Allowed events per km will decrease eco score faster. If number will be high it will be hard to get score decreased.
| |
| | |} | | |} |
| | + | |
| | + | ==Odometer== |
| | + | |
| | + | [[Image:Fmb010_odometer.png|300px|right]] |
| | + | ''Odometer Value'' sets the starting total odometer value. |
Trip Settings
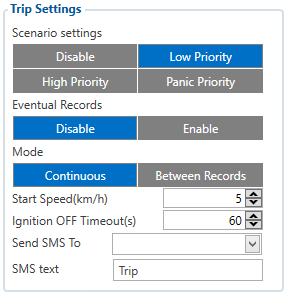
Trip section offers user to configure the Trip feature. Trip starts when Ignition according Ignition source is ON and Movement according Movement source is ON and also 'Start Speed' is exceeded. Start Speed defines the minimum GPS speed in order to detect Trip start.
Ignition OFF Timeout is the timeout value to detect Trip end once the Ignition (configured ignition source) is off.
I/O Trip Odometer must be enabled to use Distance counting mode feature. When it is set to Continuous, Trip distance is going to be counted continuously (from Trip start to Trip end) and written to I/O Trip Odometer value field. When Trip is over and the next Trip begins, Trip Odometer value is reset to zero.
When Mode is set to Between Records, the distance is going to be counted between every record made. This value is written to I/O Trip Odometer value field and is reset to zero every new record until the Trip ends. If later all Odometer values are summed up manually, the distance driven during the whole duration of the Trip can be obtained.
Advanced Trip Settings
Advanced trip settings allow configuring a number of Eco Score allowed Events per 100 km.
I/O Eco score must be enabled to get the value onto the server. Eco score is dependent on overspeeding, Eco/Green driving (harsh acceleration, braking, cornering), excessive idling and high RPM events (latter one requires OBD BT dongle). If less of parameters/scenarios are activated - it is easier to have higher Eco score. ECO scoring is differentiated by separate Trips.
There are six Eco evaluation events:
- Harsh acceleration.
- Harsh braking.
- Harsh cornering.
- Over-speeding (will only count events with value 1 (start) and ignore value 0 (end)).
- Excessive Idling (will only count events with value 1 (start) and ignore value 0 (end)).
- High RPM.
Eco score value can range from 10 (excellent) to 0.00 (very bad):
- Excellent 8.00 – 10
- Good 6.00 – 7.99
- Not Good 4.00 – 5.99
- Bad 2.00 – 3.99
- Very Bad 0 – 1.99
How Eco score is rated:

- Eallowed - ECO Score Allowed Events
- d - trip distance traveled in KM
- Egen - Total generated events
ECO score calculation example:
Example 1

Example 2


|
When Total events < 1, we ignore the formula and then Eco Score is equal to 10.
If Eco Score Allowed Events value is configured as 0, then Eco score can have only two values: 0 (when total events > 0) or 10 (when total events = 0).
|
|
|
Score is updated every 1 km driven or every 5 minutes of Trip duration.
|
|
|
Do not forget to activate "Eco score" in I/O section.
|
|
|
If RPM is enabled under OBD – events will be doubled.
|
Odometer
Odometer Value sets the starting total odometer value.





