Revision as of 13:35, 28 May 2018 by Linas.zaldokas(talk | contribs)(Created page with "{{Template:FMB640 Auto Geofence settings|model=FMB640|pic_autogeofence=300px|right}}")
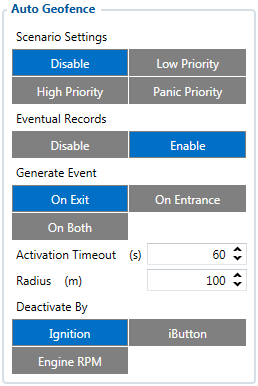
AutoGeofence is based on the last known position after the movement has stopped. You can be notified using this function if your car is taken away. The shape and size of the Geofence zones are set by parameters. It is possible to state whether entering or leaving the geofence triggers an asynchronous message. The Auto Geofencing option can be configured by the following parameters:
Priority – Priority of generated event, which will be applied to the saved record.
Eventual Records – Scenario status will be (or not, if disabled) sent with each AVL record.
Generate Event:
On Entrance – Event generation on Geofence entrance.
On Exit – Event generation on Geofence exit.
On Both – Event generation on Geofence entrance or exit.
Activation Timeout – Time period before Geofence is activated after vehicle stops.
Radius – Radius of circle where in center of it is last coordinates of device when the vehicle engine was running.
Deactivate By:
Ignition – if ignition becomes high it will drop AutoGeofenze Zone
iButton – if iButton is attached it will drop AutoGeofence Zone
Engine RPM – if engine RPM becomes more than zero it will drop AutoGeofence zone